The purpose of this project was to provide a straightforward implementation of shadow volumes using the depth fail approach. The project is divided into the following sections: After loading an object, detect duplicate vertices. Build the object's edge list while identifying each face associated with an edge. Identify the profile edges from the perspective of …

In my last post we discussed blob extraction and event tracking. We will continue with that project by adding support for two-dimensional fiducial tracking. We will attempt to implement the fiducial detection algorithm used on the Topolo Surface1. We will first describe the fiducials and how their properties are encoded in their structure, and we …
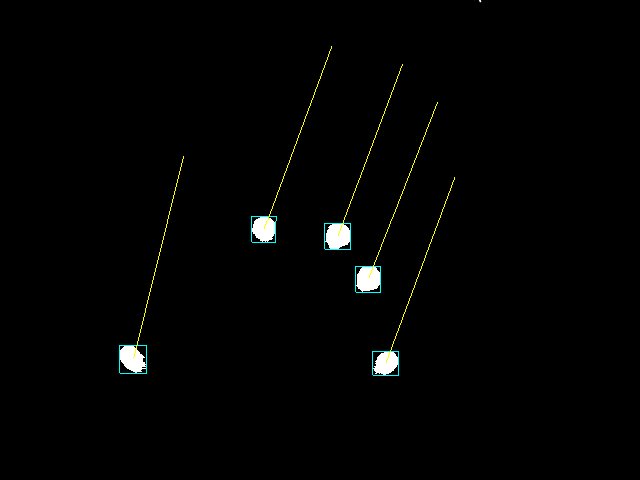
In my previous post we discussed using OpenCV to prepare images for blob detection. We will build upon that foundation by using cvBlobsLib to process our binary images for blobs. A C++ vector object will store our blobs, and the center points and axis-aligned bounding boxes will be computed for each element in this vector. …
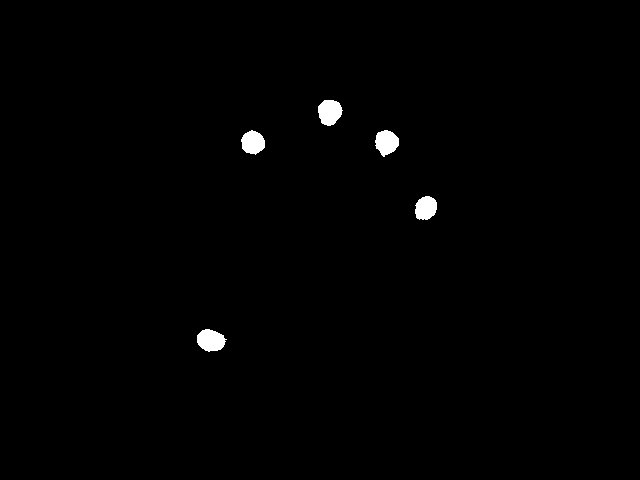
In this post I will discuss how you can capture and process images in preparation for blob detection. A future post will discuss the process of detecting and tracking blobs as well as fiducials, but here we are concerned with extracting clean binary images that will be passed to our detector module. We will use …